フロニウス社 溶接システム
ロボット溶接 自動補正システム ワイヤセンス
- 高い操作性
ワイヤ自体がセンサーとなるため、トーチ先端に大きな光学機器を取り付ける必要がありません。ロボットアームの可動範囲を狭めることなく、狭い箇所や複雑な形状のワークにもスムーズにアプローチ可能です。 - 設定の迅速化と最適化
ワークのエッジ位置と高さを高精度に検出し、その情報を即座にロボットへ転送します。測定結果に基づいて、事前に作成した溶接条件(ジョブ)を選択いただくことで、ティーチングの微調整にかかる時間を大幅に短縮します。 - 溶接速度の向上
接触式センシングのため、レーザーセンサーが苦手とする表面の反射や、油汚れの影響を受けません。センシングエラーによるライン停止や、溶接後の手直し・NG品を最小限に抑え、製造コストを大きく節約します。 - 高精度な溶接品質
0.5mm-20mmの範囲でエッジを正確に検出し、0.3mm精度の高さ測定が可能です。個体差のあるワークに対しても常に理想的な位置でアークを発生させ、均一で美しいビードの形成を実現します。
ワークのズレや隙間を検知し、最適な溶接位置へ自動補正
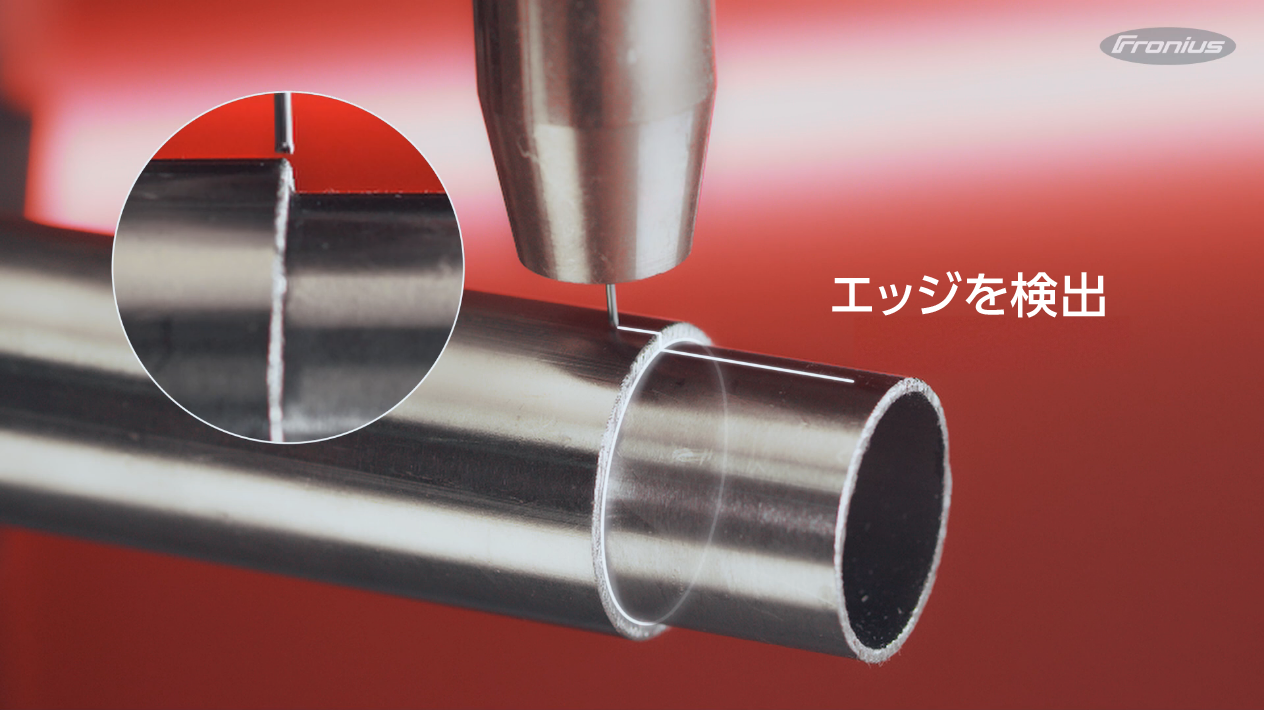
ワイヤセンスは、溶接ワイヤ自体をセンサーとして活用し、溶接の直前に対象ワークのエッジ検出を行います。検出した高さや位置情報を即座にロボットへ転送することで、常に最適な溶接プログラムへの自動補正をサポートします。

- 幅広い板厚に対応
0.5mmから20mmの範囲で高精度なエッジ検出が可能。 - 主要な溶接継手に適用可能
薄板アプリケーションにおける「重ね隅肉溶接」および「突合せ溶接」に最適。 - あらゆる金属材質に対応
一般鋼、アルミニウム、ステンレス鋼に加え、銅やチタンなどの特殊な金属にも適用可能。 - システム要件
本システムの運用には、TPS/i CMTと同等の仕様およびソフトウェアが必要。
光学センサーとの比較
| 項目 | レーザーセンサー | ワイヤセンス | 比較 |
|---|---|---|---|
| TCPに関する精度の安定性 ※TCP:ツールセンターポイント |
ワイヤセンス:TCPが測定ポイントのため常に一定。 レーザー:コンタクトチップの摩耗により偏差が発生。 |
||
| 作業エリアへの接近性 | ワイヤセンス:追加ユニット不要、ワイヤ電極がセンサーになる。 レーザー:ロボットアームへの設置が必要。 |
||
| プロセスの安全性(反射・汚れ等) | ワイヤセンス:溶接対象物の表面状態に影響されない。 レーザー:表面の異物や反射が大きく影響する。 |
||
| システムの堅牢性 | ワイヤセンス:ハードウェア・ソフトウェア機能の追加不要。 レーザー:ロボットアーム上に精密装置の設置が必要。 |
||
| 導入費用 | ワイヤセンス:導入コストをレーザーセンサーに比べて大幅に抑制可能。 |
ワイヤセンス システム構成

| カテゴリ | 構成要素 | 型式・製品番号 |
|---|---|---|
| ソフトウェア | 必須オプション | OPT/i WireSense |
| ハードウェア | CMTドライブユニット | WF 60i RobactaDrive CMT |
| ワイヤバッファ | Wire buffer CMT または SB 60i | |
| ワイヤ送給装置 | WF 25i REEL または WF 30i REEL | |
| 基本要件 | 溶接電源 | TPS/i CMT 仕様およびソフトウェア |
仕様
| 項目 | エッジ検出(Edge Detection) | 高さ測定(Sensing) |
|---|---|---|
| 主な用途 | ワークのエッジ位置と高さの特定 | ワークの正確な寸法・高さ測定 |
| 対応範囲 | 板厚:0.5mm-20mm | 最大測定範囲:±24mm |
| 測定精度 | エッジ高さ測定精度:0.3mm | エッジ高さ測定精度:0.3mm |
| 繰返し精度 | 最大 ± 0.2mm(溶接なし20回時) | 最大 ± 0.2mm(溶接なし20回時) |
| サンプリングレート | 100Hz | 100Hz |
| 動作条件 | ロボット速度:50cm/min-3m/min(推奨:約1.5m/min) | 推奨最長検知時間:30秒以内 |